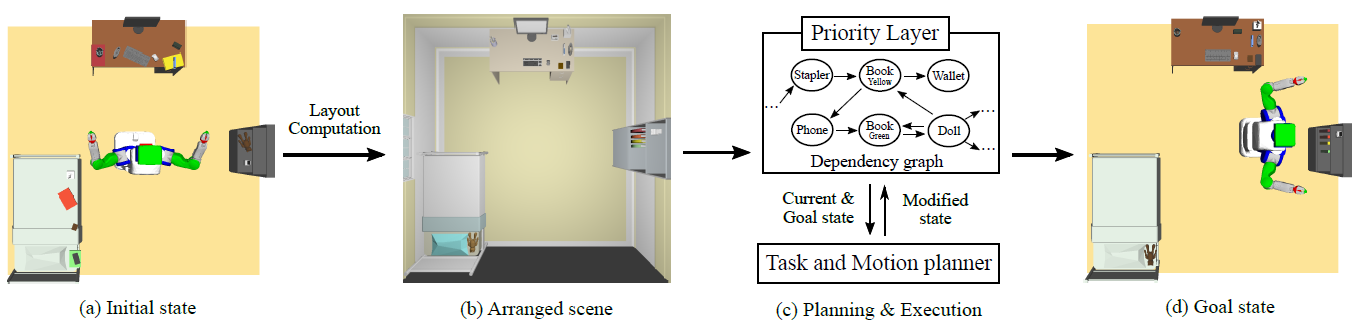
This shows an overview of our approach. Our method first constructs an arranged scene as the target layout (b) from the initial state (a) using various relationships extracted from user' positive examples. At runtime, we use our priority layer, considering the computed layout and various relationship between objects defined in a dependency graph, for a robot to arrange objects by using a task and motion planner (TMP). The priority layer communicate with TMP (c). We repeat to use TMP with our priority layer until all the objects are arrived at their goal state (d).
Abstract
We present a method enabling a robot to automatically
arrange objects using task and motion planning. Given
an input scene consisting of cluttered objects, our method first
constructs a target layout of objects as a guidance to the robot
for arranging them. For constructing the layout, we use positive
examples and pre-extract hierarchical, spatial and pairwise
relationships between objects, to understand the user preference
on arranging objects. Our method then enables a robot to
arrange input objects to reach their target configurations using
any task and motion planner. To efficiently arrange the objects,
we also propose a priority layer that decides an order of
arranging objects to take a small amount of actions. This is
achieved by utilizing a dependency graph between objects. We
test our method in three different scenes with varying numbers
of objects, and apply our method to two well-known task and
motion planners with the virtual PR2 robot. We demonstrate
that we can use the robot to automatically arrange objects, and
show that our priority layer reduces the total running time up
to 2.15 times in those tested planners.