|
|
|

IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020
by Heechan Shin and Sung-Eui Yoon
Korea Advanced Institute of Science and Technology (KAIST)
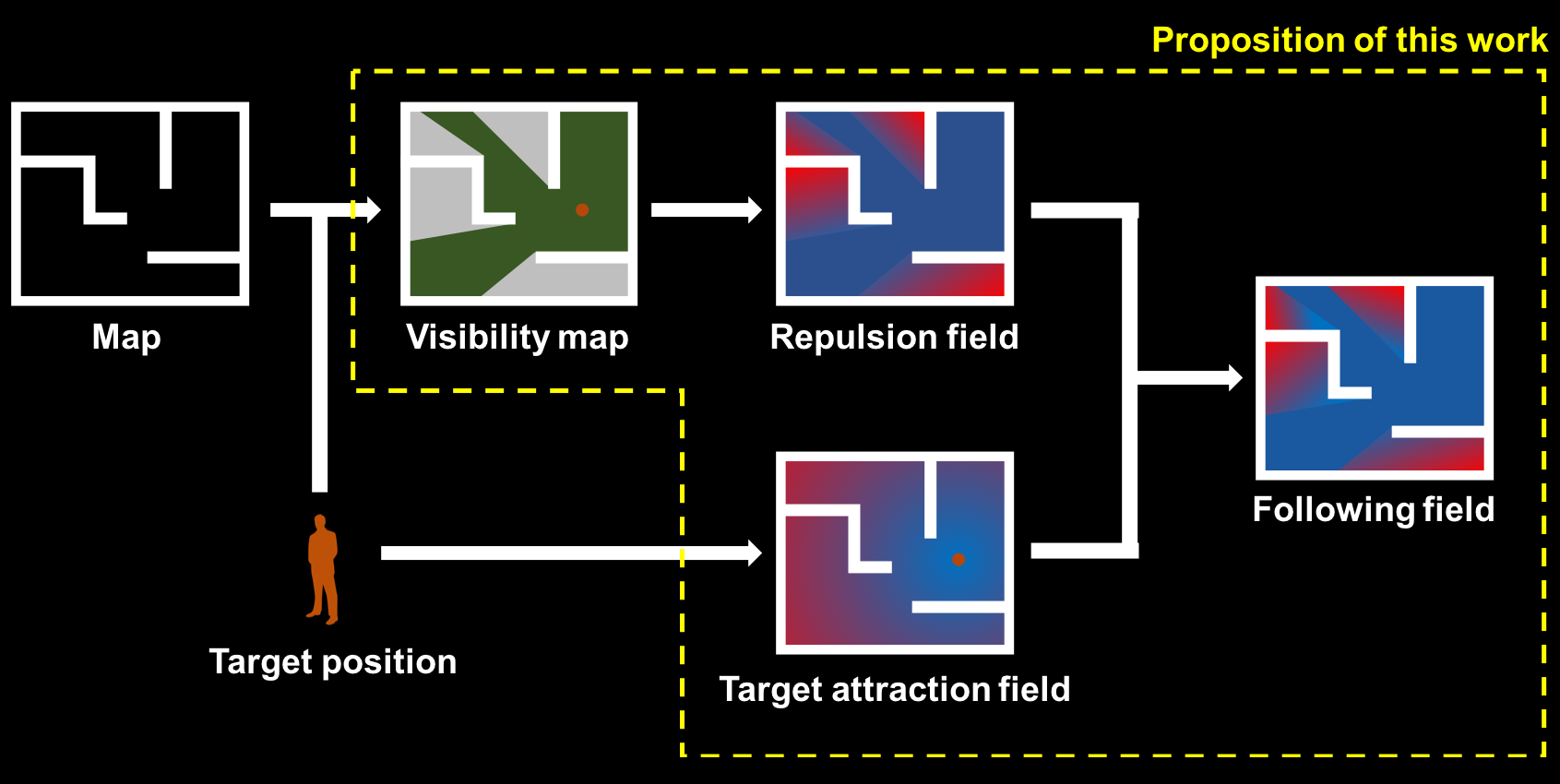
In this work, our goal was propose a way of following a person well. To do so, we suggest to generate Follosing Field. To build it, we introduce fast visibility map generation, a repulsion field generation, and a target attraction field generation.
VIDEO
Abstract
Person following is an essential task for a robot to serve a person. In an indoor environment, however, the following task can be failed due to the occlusion of the target by structures, e.g., walls or pillars. To address this problem, we propose a method that helps the robot follow the target well and rapidly re-detect the target after missing. The proposed method is an optimization-based path planning which uses a Following Field that we propose in this paper. The following field consists of two sub-fields: the repulsion field getting the robot out of the occluded area, and the target attraction field pushing the robot toward the target. We introduce how to construct the fields and how to integrate the field into a path optimization process. We show that our method works properly for following the target well in a maze consisting of various in-door features.