by Junghwan Lee,
OSung Kwon, Liangjun Zhang, Sung-Eui Yoon
IEEE International Conference on Robotics and Automation (ICRA), 2012
|
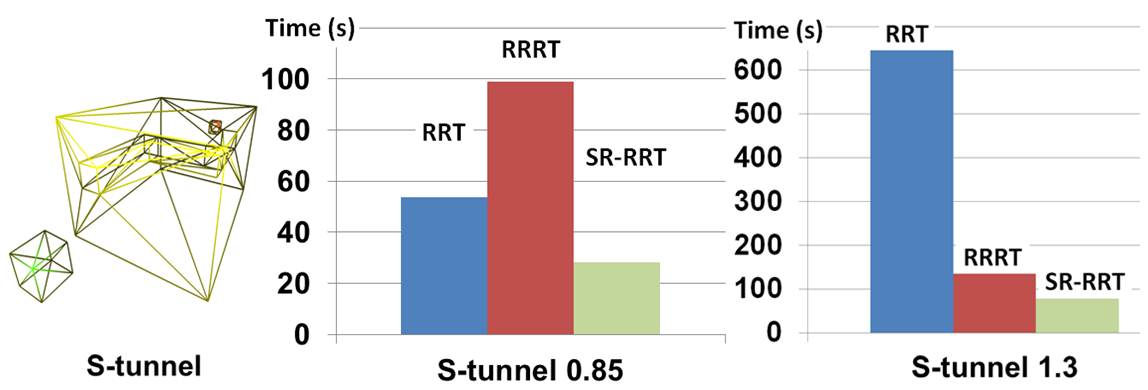
| S-tunnel Benchmark: The leftmost figure shows the S-tunnel benchmark. The right two figures show the average performance of two variations of the S-tunnel benchmark. 0.85 and 1.3 indicate the scaling factor of the cubic robot. 0.85 does not create any narrow passages, while 1.3 creates them. |
Abstract
We present a novel retraction-based planner, selective retraction-based RRT, for efficiently handling a wide variety of environments that have different characteristics. We first present a bridge line-test that can identify regions around narrow passages, and then perform an optimizationbased retraction operation selectively only at those regions. We also propose a non-colliding line-test, a dual operator to the bridge line-test, as a culling method to avoid generating samples near wide-open free spaces and thus to generate more samples around narrow passages. These two tests are performed with a small computational overhead and are integrated with a retraction-based RRT. In order to demonstrate benefits of our method, we have tested our method with different benchmarks that have varying amounts of narrow passages. Our method achieves up to 21 times and 3.5 times performance improvements over a basic RRT and an optimization-based retraction RRT, respectively. Furthermore, our method consistently improves the performances of other tested methods across all the tested benchmarks that have or do not have narrow passages.
Contents
Paper: PDF (1.4MB)Presentation: PDF (0.6MB)
@inproceedings{SRRRT,
author = {Junghwan Lee and
OSung Kwon and
Liangjun Zhang and
Sung-eui Yoon},
title = {SR-RRT: Selective retraction-based RRT planner},
booktitle = {ICRA},
year = {2012},
pages = {2543-2550},
ee = {http://dx.doi.org/10.1109/ICRA.2012.6224928},
crossref = {DBLP:conf/icra/2012},
bibsource = {DBLP, http://dblp.uni-trier.de}
}
Journal version: T-RO 2014
Earlier version (technical report): SR-RRT: Selective Retraction-based RRT Planner
Junghwan Lee, OSung Kwon, Liangjun Zhang, and Sung-Eui Yoon KAIST Tech. Report, CS-TR-2011-352 July, 2011
Dept. of Computer Science
KAIST
291 Daehak-ro, Yuseong-gu, Daejeon, 305-701
South Korea
sglabkaist at gmail dot com