IEEE International Conference on Robotics and Automation (ICRA) 2014
by Donghyuk Kim , Junghwan Lee and Sung-Eui Yoon
Korea Advanced Institute of Science and Technology (KAIST)
Abstract
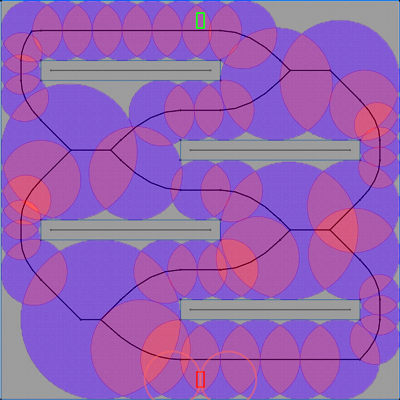
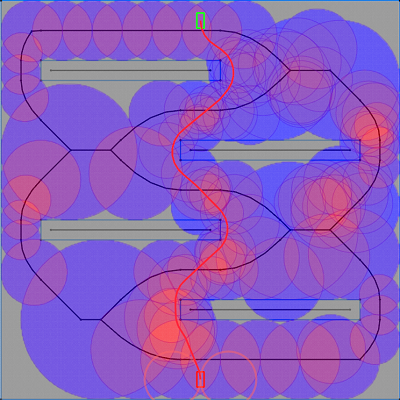
We present a novel biased sampling technique, Cloud RRT* for efficiently computing high-quality collision-free paths, while maintaining the asymptotic convergence to the optimal solution. Our method uses sampling cloud for allocating samples on promising regions. Our sampling cloud consists of a set of spheres containing a portion of the C-space. In particular, each sphere projects to a collision-free spherical region in the workspace. We initialize our sampling cloud by conducting a workspace analysis based on the generalized Voronoi graph. We then update our sampling cloud to refine the current best solution, while maintaining the global sampling distribution for exploring understudied other homotopy classes. We have applied our method to a 2D motion planning problem with kinematic constraints, i.e., the Dubins vehicle model, and compared it against the state-of-the-art methods. We achieve better performance, up to three times, over prior methods in a robust manner.
Contents
Paper (author preprint / pdf / 1.7MiB)Presentation slides (pdf / 6.1MiB)
|
|
|