|
|
|
Sampling based Planning
We are working on various planning techniques for different types of robots. Some of examples include:
|
Adaptive Lazy Collision Checking for Optimal Sampling-based Motion Planning

Donghyuk Kim, Youngsun Kwon and Sung-Eui Yoon
Int. Conf. on Ubiquitous Robots(UR) 2018
|
|
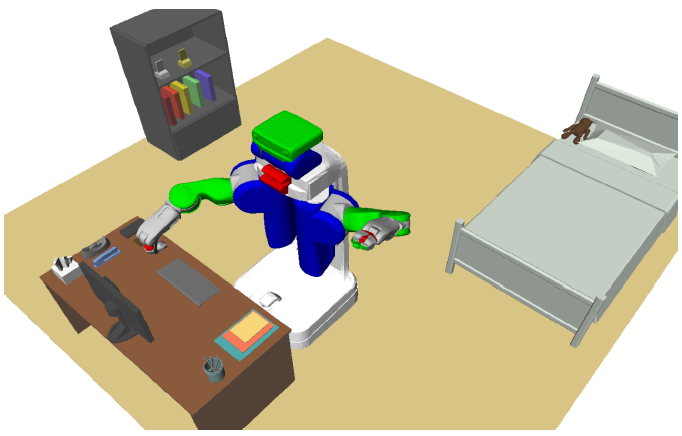
Automated task planning using object arranement optimization
Mincheul Kang, Youngsun Kwon and Sung-Eui Yoon
Int. Conf. on Ubiquitous Robots(UR) 2018
Source code: ZIP file,
Github page
|
|
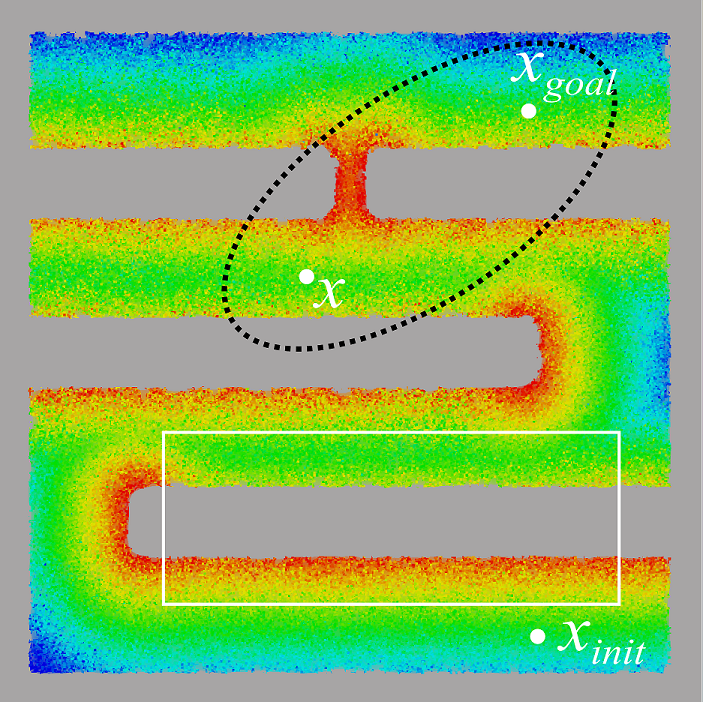
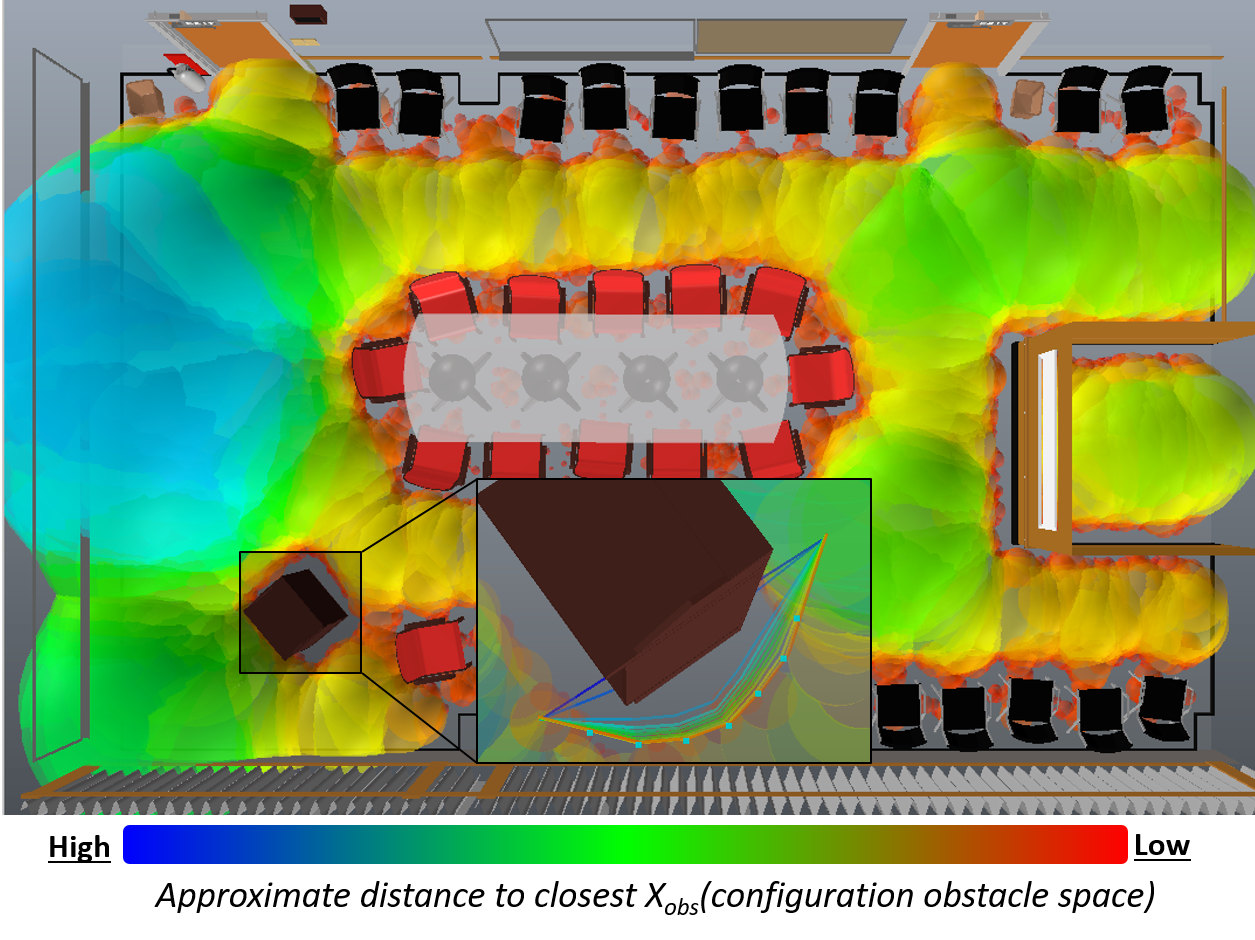
Dancing PRM* : Simultaneous Planning of Sampling and Optimization with Configuration Free Space Approximation
Donghyuk Kim, Youngsun Kwon and Sung-Eui Yoon
IEEE Int. Conf. on Robotics and Automation (ICRA) 2018
|
|
DDK-RRT: A Data Driven Kinodynamic RRT for continuous kinodynamic planning with complex dynamics
Junghwan Lee, Heechan Shin and Sung-Eui Yoon
Accepted to International Conference on Advanced Robotics(ICAR), 2017 (oral paper)
Received the best paper award in robotic planning
|
|
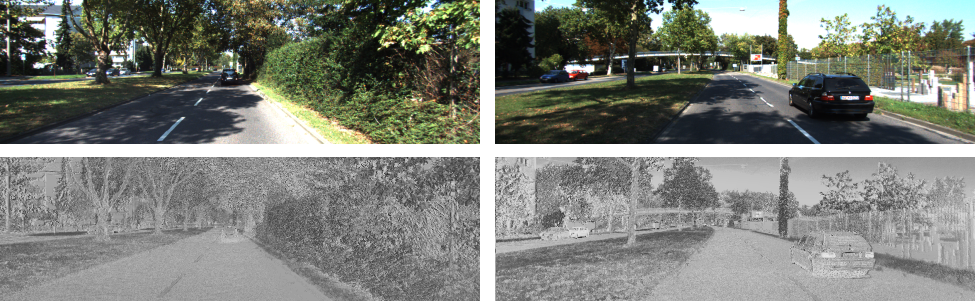
PCA based Computation of Illumination-Invariant Space for Road Detection
Taeyoung Kim, Yu-Wing Tai and Sung-Eui Yoon
Accepted to WACV 2017
Source code: ZIP file, Github page
|
|
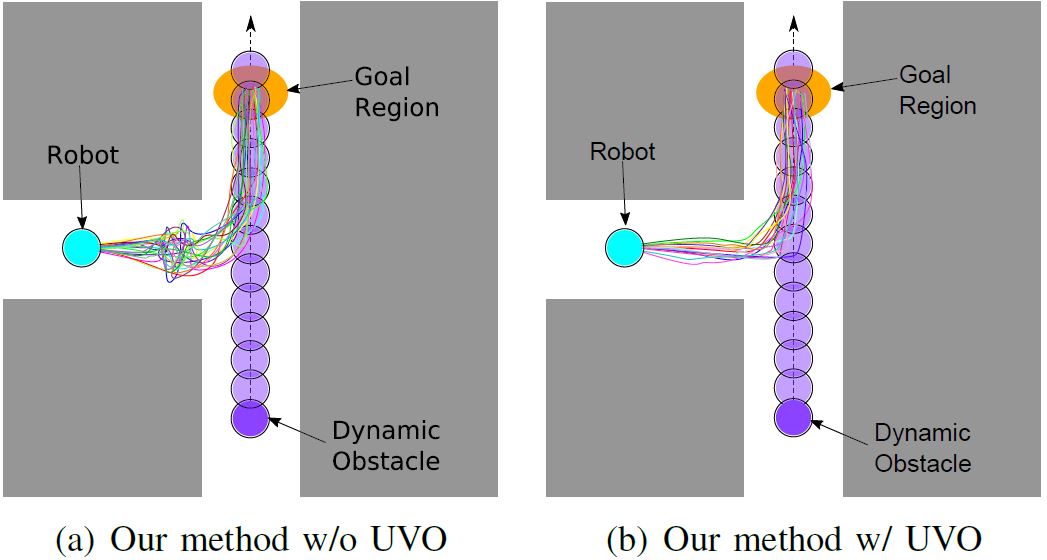
Anytime RRBT for Handling Uncertainty and Dynamic Objects
Hyunchul Yang, Jongwoo Lim, Sung-Eui Yoon
Accepted to IROS2016
|

|
Super Ray based Updates for Occupancy Maps
Youngsun Kwon, Donghyuk Kim, Sung-Eui Yoon
IEEE Int. Conf. on Robotics and Automation (ICRA) 2016
Source code: ZIP file,
Github page
|

|
Recursive Path Planning Using Reduced States for Car-like Vehicles on Grid Maps
Sangyol Yoon, Sung-Eui Yoon, Unghui Lee, and David Hyunchul Shim
(Accepted at) IEEE Transactions on Intelligent Transportation Systems, 2015
|
|
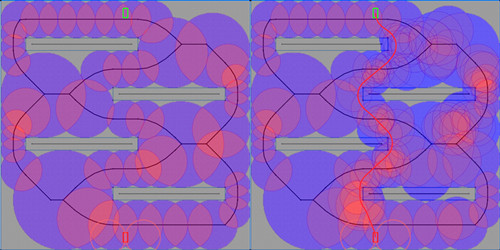
Selective retraction-based RRT planner for various
environments
Junghwan Lee, OSung Kwon, Liangjun Zhang, and Sung-Eui Yoon
(To appear) IEEE Transactions on Robotics (T-RO), 2014
|
|
Cloud RRT*: Sampling Cloud based RRT*
Donghyuk Kim, Junghwan Lee, Sung-Eui Yoon
Accepted to ICRA2014
|
|
PROT: Productive Regions-Oriented Task space path planning for hyper-redundant manipulators
Junghwan Lee and Sung-eui Yoon
Accepted to ICRA2014
|

|
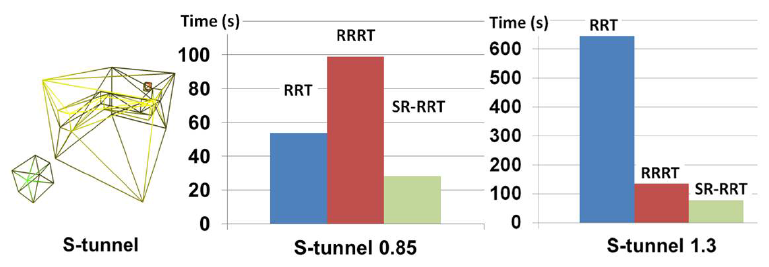
SR-RRT: Selective Retraction-based RRT Planner
Junghwan Lee, OSung Kwon, Liangjun Zhang, and Sung-eui Yoon
IEEE International Conference on Robotics and Automations (ICRA) 2012
|
|
| | |

